
Пневмоподача пеллет
20.01.2018
У одного нашего заказчика появилась задача автоматизировать подачу пеллет из внешнего накопительного бункера в оперативный бункер котла.
Пеллетный котел мощностью 32кВт является источником тепла для всей его инфраструктуры. У котла имеется встроенный бункер на 70л и пневмоподача. Пневмоподача представляет из себя однофазный пылесос который установлен в верхней части бункера к которому можно подключить внешний шланг, через который и засасываются пеллеты. Расход котла при условии отрицательной температуры на улице составляет примерно 70 литров за 12 часов. Для того чтобы не осуществлять ручную загрузку два раза в день прямо в котельной был построен большой внешний бункер на примерно 5 тонн пеллет с промышленным подающим конвеерным шнеком. Шнек приводится в движение трех-фазным двигателем.
Штатная схема автоматизации которая предлагалась поставщиком котла не выдерживала критики. Например, в одном из режимов могло произойти межфазное КЗ. При этом никаких уведомлений, сигнализаций также не предлагалось. Поэтому заказчик обратился к нам чтобы мы построили интегрированную в его систему автоматизации систему автоматической подачи пеллет из внешнего бункера в оперативный бункер котла.

На вал трех-фазного двигателя установили колесо с приклеенным магнитом. На неподвижную часть мотора по ходу движения колеса установили три датчик-геркона. Для получения информации от герконов использовали устройство TD-IO6. На это же устройство мы через реле получаем информацию о факте включения пневмоподачи от котла (сухой контакт) и наличие ошибки на частотнике (сухой контакт).
Написали автомат, который по герконам позволяет определить: факт движения по часовой стрелке, факт движения против часовой стрелки, отсутствие движения.
Вот описание этой стэйт машины - MotionControl.fsm
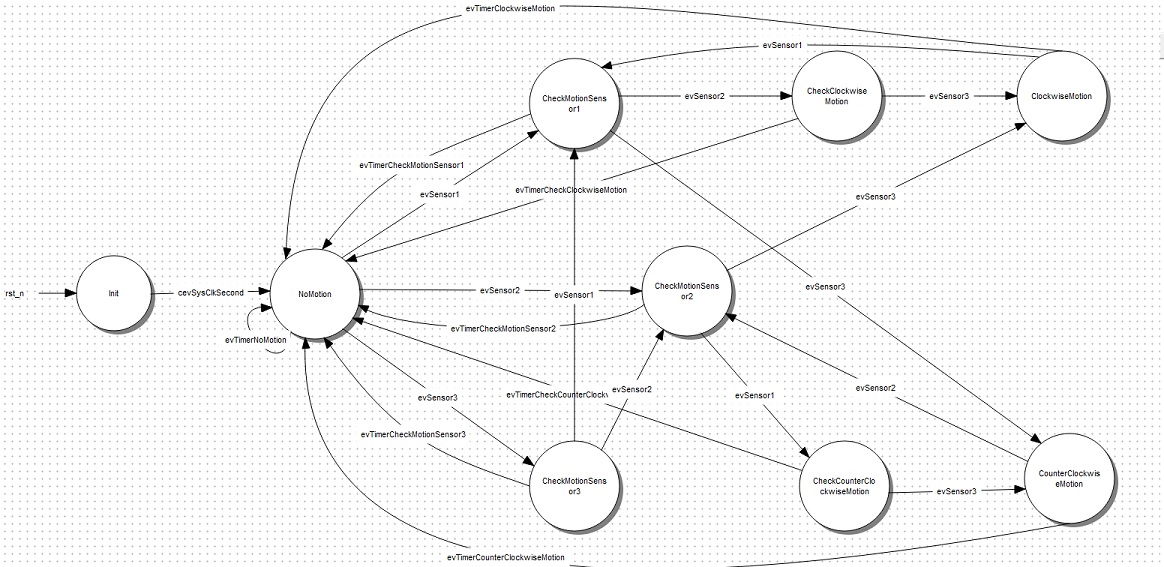
Данная машина получает сигналы от трех герконов (evSensor1, evSensor2, evSensor3,), расположенных вдоль колеса, на котором закреплен магнит. Если колесо не движется, машина каждые 6 секунд (регулируется таймером evTimerNoMotion) выдает сигнал нет_движения (evNoMotion). Если колесо движется против часовой стрелки машина - выдает сигнал вращение_против_часовой_стрелки (evCounterClockWiseMotion), если по часовой - выдает сигнал вращение_по_часовой_стрелки (evClockWiseMotion). В данном применении полный оборот колеса занимает около 6 секунд и по умолчанию в машине все таймеры стоят со значение 6 секунд. Можно поменять таймеры в соответствии с тем с какой скоростью движется ваше колесо. Период обращения колеса можно менять таймерами:
evTimerNoMotion,
evTimerClockwiseMotion,
evTimerCheckMotionSensor1,
evTimerCheckClockwiseMotion,
evTimerCheckMotionSensor2,
evTimerCheckCounterClockwiseMotion,
evTimerCheckMotionSensor3,
evTimerCounterClockwiseMotion.
Далее мы разорвали цепь питания пылесоса через реле с катушкой 24В которое подключено к TD-PWR24. Сделано это для предотвращения холостой работы пневмоподачи при не работающем подающем шнеке. Туда же через еще одно реле подключили частотник 220В -> 380В.
Логика работы такова. Как только котел включает свою пневмоподачу мы понимаем что требуется топливо. Факт включения мы видим на IO6. Подаем сигнал на включение шнека. Если получаем подтверждение что шнек вращается, считаем что идет загрузка. После того как малый бункер будет заполнен котел выключит пневмоподачу и мы увидим это на соответствующем порту IO6 и выключим шнековую подачу.
Отработка ошибок. Если не приходит подтверждение, что шнек вращается, мы один раз включаем реверс на 2 секунды и вновь подачу. Если вращение не происходит мы останавливаем шнек, останавливаем пневмоподачу, зажигаем локальную лампу "Ошибка", подаем локальный звуковой сигнал и отправляем sms / e-mail уведомление персоналу.
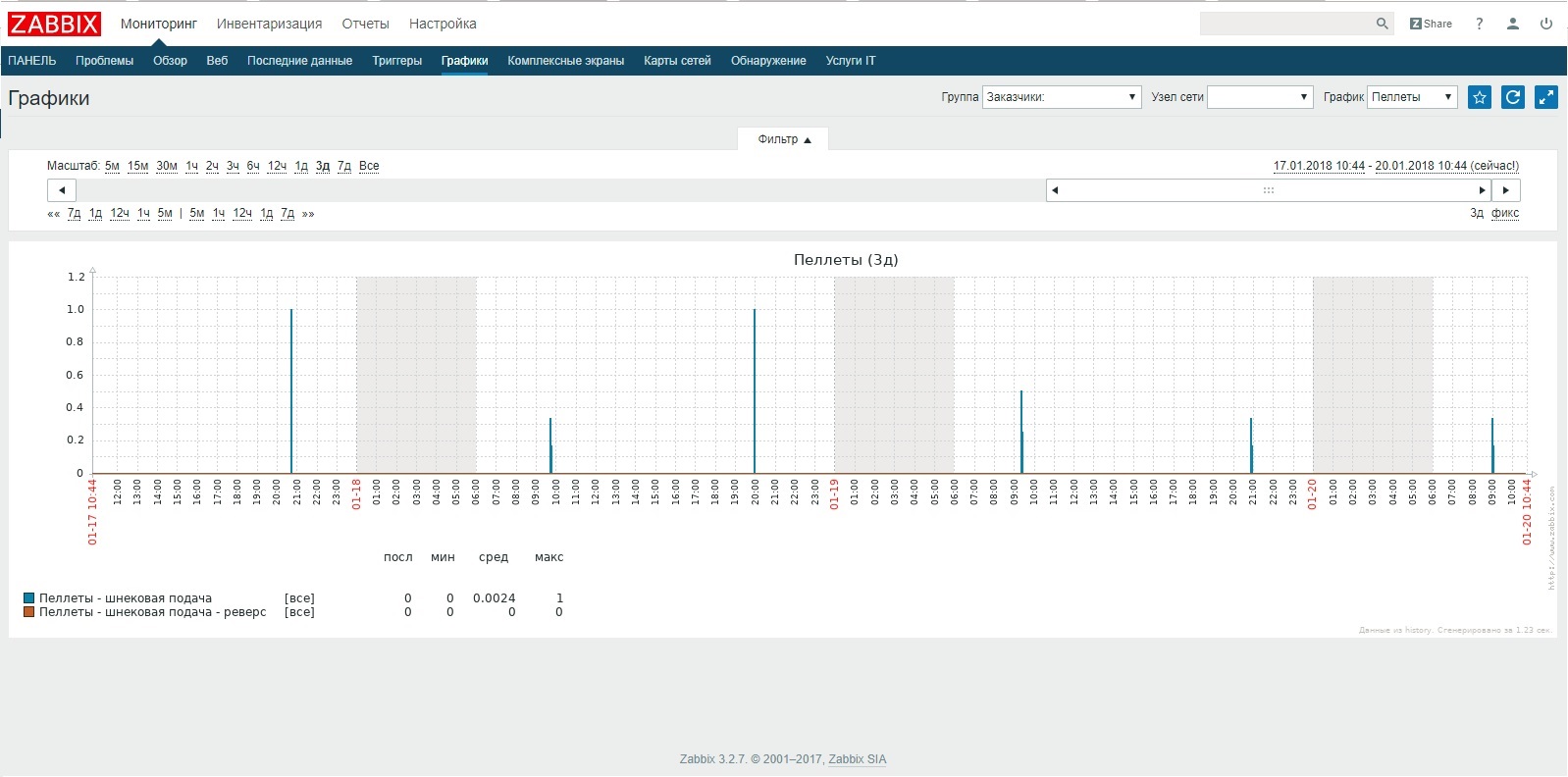
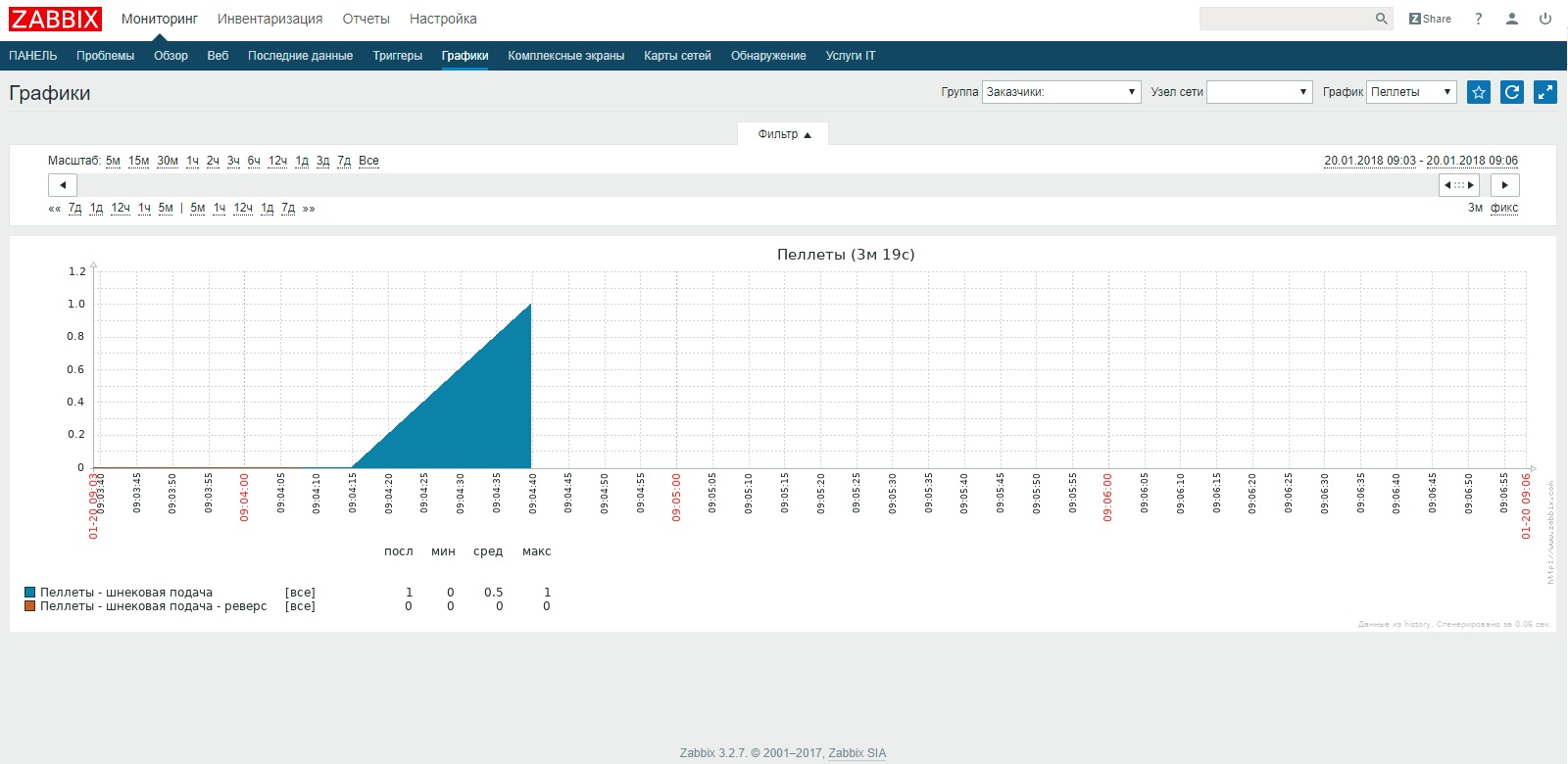
Автоматика выдает всю телеметрию в облачную систему мониторинга. В ряде случаев это позволило заказчику разобраться в неоднозначных действиях персонала на объекте и принять правильные управленческие решения.
Система работает 1,5 года и перемолола около 15тонн пеллет.